
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||||||
|
|||||||||||||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

上海中人专业提供ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统,是专业的星空(中国)生产厂家,我们欢迎您来我们生产基地考察ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统,并为您提供专业的解决方案。星空(中国)可以解决教师教学缺少平台,学生缺少实操经验的难题。ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统,是中人公司的品质效益保障教学产品。 文章内容中的图片为参考图片,仅供参考,以实物为准.
本文关键词:ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统
本文关键词:柔性制造系统、自动化生产线、智能制造实训系统
一、工业4.0、柔性制造系统、自动化生产线、智能制造实训系统概述
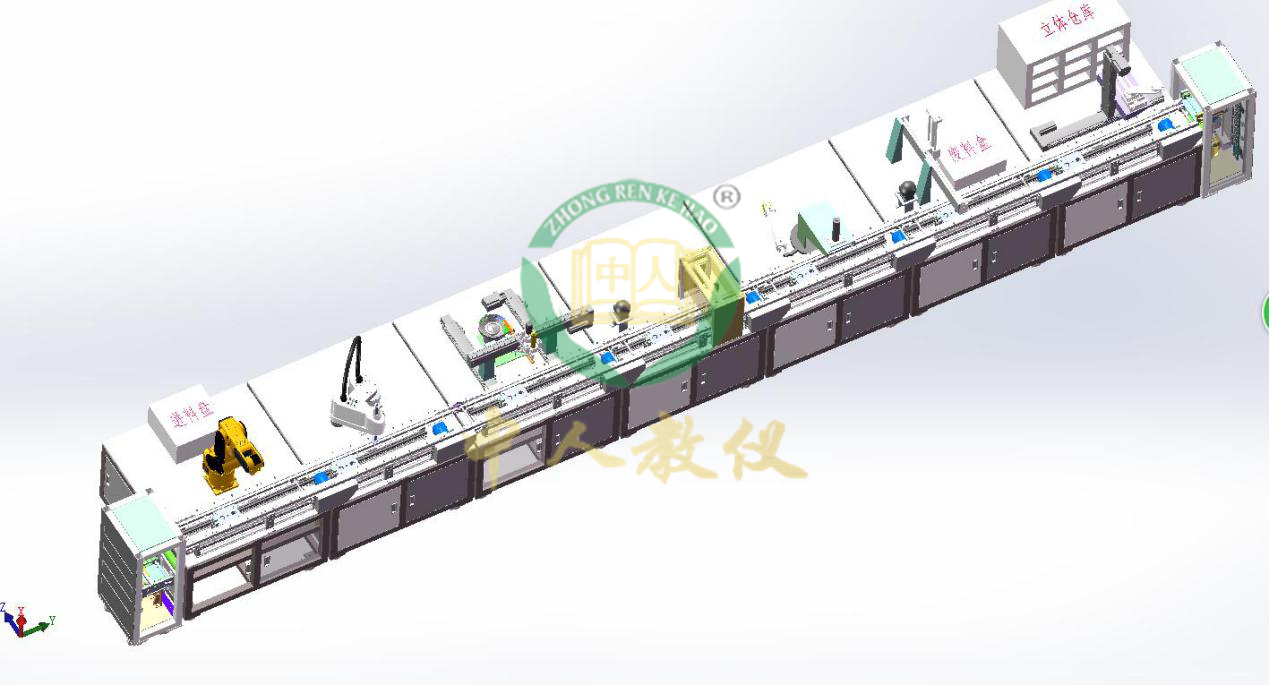
工业4.0,柔性制造系统,自动化生产线,智能制造实训系统是一种最为典型的机电一体化、自动化类产品,它是为职业院校、教育培训机构等而研制的,它适合机械制造及其自动化、机电一体化、电气工程及自动化、控制工程、测控技术、计算机控制、自动化控制等相关专业的教学和培训。它在模拟工业生产制造现场基础上双针对实训教学进行了专门设计,强化了各种控制和工程实践能力。模块化柔性自动化生产线实训系统包含了机电一体化专业中的气动、电机驱动与控制、PLC、变频器、触摸屏、传感器,机器视觉,机器人应用等多种控制技术,适合相关专业学生进行工程实践、课程设计及初上岗位的工程技术人员进行培训。
1、 工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;
2、 工作台采用焊接底座,整块铝板,尺寸1200*1100,工业型上下立体组装流水线;
3、 系统有可扩展性,可方便扩展AGV小车系统,实现无人工厂;
4、 流水线可升级软件实训功能、无人工厂仿真,APP等生产过程可视化,可管可控;
5、 具有APP功能,可查看每站的工作状态;
6、 具有大数据功能,能查看,统计生产线的生产进展,异常信息;
7、 机器人具有拖动示教功能,具有6个方向的拖动示胶功能。
8、 具有视觉检测功能,测量精度达到<0.05mm;
9、 高精度载具,定位精度<0.05mm; (看大华标书);
10、具有机械整形机构,精度优于0.05mm;
1. 输入电源:单相三线AC220V ±10% 50Hz,装置容量:<1.5kVA;
2. 工作环境:环境温度范围为-5℃~+40℃ 相对湿度<85%(25℃)海拔<4000m
3. 标准工作站尺寸:1200mm*1100mm*1800mm;
4. 直线型安装,流水线尺寸:9米*2.5米*1.8米;
5. U型安装,流水线尺寸:6米*4米*1.8米;
6. L型安装,流水线尺寸:6.5米*5.5米*1.8米
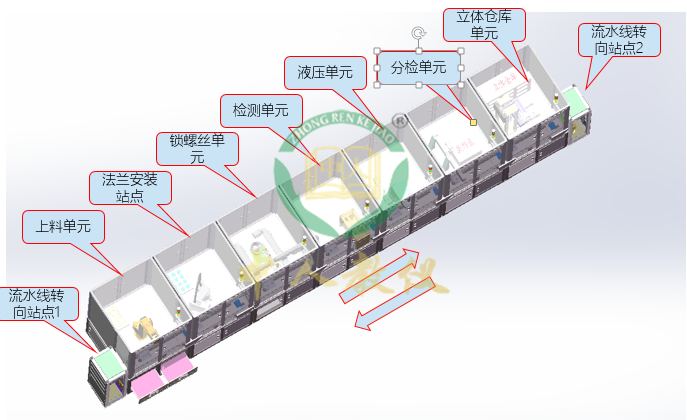
系统由9个工作站----流水线转向站点1、上料单元、法兰安装站点、锁螺丝单元、液压单元、视觉检测单元、分拣单元、立体仓库单元、流水线转向站点2和一些辅助单元—滚筒皮带转角单元、空直线单元组成。
一、总体要求,以下技术项必须满足。
1. ▲工作台采用独立模块设计,安装时可组成直线型,L,U型组线;
2. ▲工作台采用焊接底座,整块铝板,尺寸1200*1100;
3. ▲采用上下立体组装流水线,具有载具定位,阻档功能;
4. ▲系统具有可扩展性,可方便扩展AGV小车,实现自动进料;
5. ▲具有APP功能,可查看每站的工作状态,并操作每个站的功能;
6. ▲具有大数据功能,能查看,统计生产线的生产进展,异常信息;
7. ▲机器人具有拖动示教功能,具有6个方向的拖动示教功能。
8. ▲具有视觉检测功能,测量精度达优于0.1mm;
9. ▲高精度载具,定位精度优于0.1mm;
10. ▲具有机械整形机构,精度优于0.1mm;
总体布局示意图如下:
直线型,现场布局尺寸9米X2.5米
U型,现成布局尺寸6米X4米
L型,现成布局 6.5米X5.5米

| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 流水线转向 | 2 | 包含1套载具回流阻挡机构 |
| 2 | 标准工作台 | 7 | |
| 3 | 6关节工业机器人 | 1 | |
| 4 | SCARA工业机器人 | 1 | |
| 5 | 上层输送线 | 7 | |
| 6 | 下层输送线 | 7 | |
| 7 | 阻挡定位升降组件 | 7 | 有BUFFEER功能 |
| 8 | 工装吸盘组件 | 2 | |
| 9 | 螺丝振动盘 | 1 | |
| 10 | 高精度3坐标机器人 | 1 | |
| 11 | 伺服电批组件 | 1 | |
| 12 | 气动直角机器人 | 1 | |
| 13 | 液压组件 | 1 | |
| 14 | 电梯式立体仓库 | 1 | |
| 15 | 龙门式安装视觉组件 | 1 | |
| 16 | 红外扫描组件 | 2 | |
| 17 | 机械式整形组件 | 2 | |
| 18 | 料盘 | 2 | 每个料盘一次性可承放多个物料 |
| 19 | 阻挡组件 | 2 | 采用阻挡气缸 |
| 20 | 载具 | 12 | |
| 21 | 物料 | 12 | 物料有不同材质、大小、颜色区别 |
| 22 | 高精度治具 | 12 | |
| 23 | 电脑 | 8 | |
| 24 | 实训电脑桌 | 8 |
| 序号 | 组成项 | 数量 | 技术要求 |
| 1 | 升降机架 | 1 | 50X50方管 |
| 2 | 升降组件 | 1 |
1、步进驱动 2、线轨丝杆模组 3、装有原点关,限位开关 |
| 3 | 换向组件 | 1 |
1、异步减速电机驱动 2、同步带流水线 |
| 序号 | 组成项 | 数量 | 技术要求 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | ▲6关节工业机器人 | 1 | 6关节机器人,行程>700mm,负载6Kg。机器人具有拖动示教功能,具有6个方向的拖动示胶功能 |
| 3 | 法兰底座料盘 | 1 | 料盘一次性可承放9个物料 |
| 4 | ▲机械式整形组件 | 1 | 整形精度优于0.1mm; |
| 5 | 上层输送线 | 1 |
速度可调,且运行时可切换速度, 0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 6 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 7 | 阻挡升降定位组件 | 1 | 高精度定位,定位精度<0.1mm |
| 8 | 吸盘工装组件 | 1 | 采用真空吸盘取料、负压传感器检测 |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 法兰进料盘 | 1 | 料盘一次性可承放多个物料 |
| 3 | SCARA工业机器人 | 1 | 快速,高精度抓取 |
| 4 | 机械式整形组件 | 1 | |
| 5 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 6 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 7 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工装台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 振动盘 | 1 | |
| 3 | 线轨丝杆三坐标机器人 | 1 | 伺服驱动,高精度运行 |
| 4 | 伺服电批 | 1 | 数控扭力电批且带行程检测感应器 |
| 5 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 6 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 7 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 红外扫描仪 | 1 | |
| 3 | 视觉检测 | 1 | 龙门式安装,测量精度达到0.05mm |
| 4 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 5 | 阻挡组件 | 1 | 采用阻挡气缸 |
| 6 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 7 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 液压组件 | 1 | 采用齿轮,油缸,连杆机构 |
| 3 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 4 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 5 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 气动直角机器人 | 1 | 采用气缸 |
| 3 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 4 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 5 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 6 | 红外扫描仪 | 1 | |
| 7 | 吸盘工装组件 | 1 | 采用真空吸盘,负压传感器 |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | 电梯式立体仓库 | 1 | 采用链轮、链条升降 |
| 3 | 上层输送线 | 1 |
速度可调,且运行时可切换速度 0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 4 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 5 | 阻挡定位升降组件 | 1 | 高精度定位,定位精度<0.05mm |
| 6 | 取料工装 | 1 | 采用气动手指 |
| 序号 | 物料名称 | 数量 | 备注 |
| 1 | 升降机架 | 1 | 50X50方管 |
| 2 | 线轨丝杆模组 | 1 | 步进驱动 |
| 3 | 换向组件 | 1 | 异步减速电机驱动 |
